About the project
This project presents a portable, lightweight tripod platform controlled via BLE designed to pan and tilt using two servo motors. The system enables fine-grained motion control using custom commands sent from a smartphone app. It is built using a Raspberry PiPico, a PCA9685 16-channel servo driver, and an HM-10 Bluetooth module, with power supplied via USB power bank. Commands are issued through the LightBlue BLE interface on iOS, offering low-latency manual control in any environment.
-
○ Controls logic and BLE UART
○ Sends I2C signals to PCA9685
-
○ Connected via UART (TX/RX @ 3.3V logic)
○ Receives BLE commands from smartphone
-
○ Connected via I2C to Pico (SDA, SCL)
○ Provides PWM output to servos
-
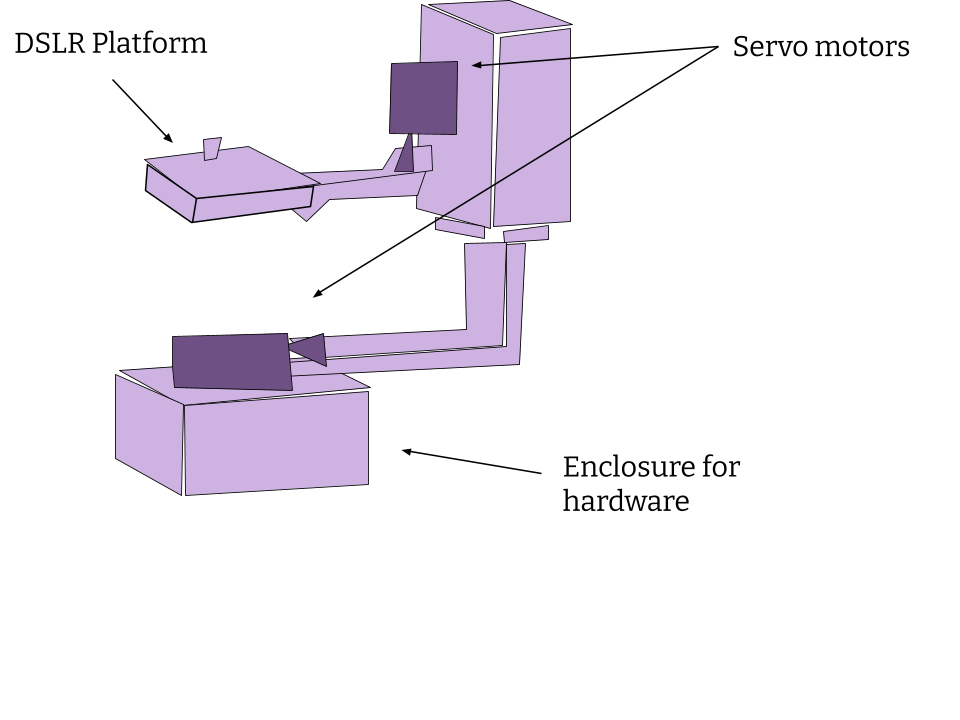
○ One motor for pan (horizontal rotation)
○ One motor for tilt (vertical motion)
○ Powered from Raspberry Pi Pico as well